wheel ECAM and LGCIU interpolate gear pos
This commit is contained in:
parent
ce2d2415e0
commit
934064042f
3 changed files with 41 additions and 10 deletions
{kind=link}
Binary file not shown.
|
Before 
(image error) Size: 24 KiB After 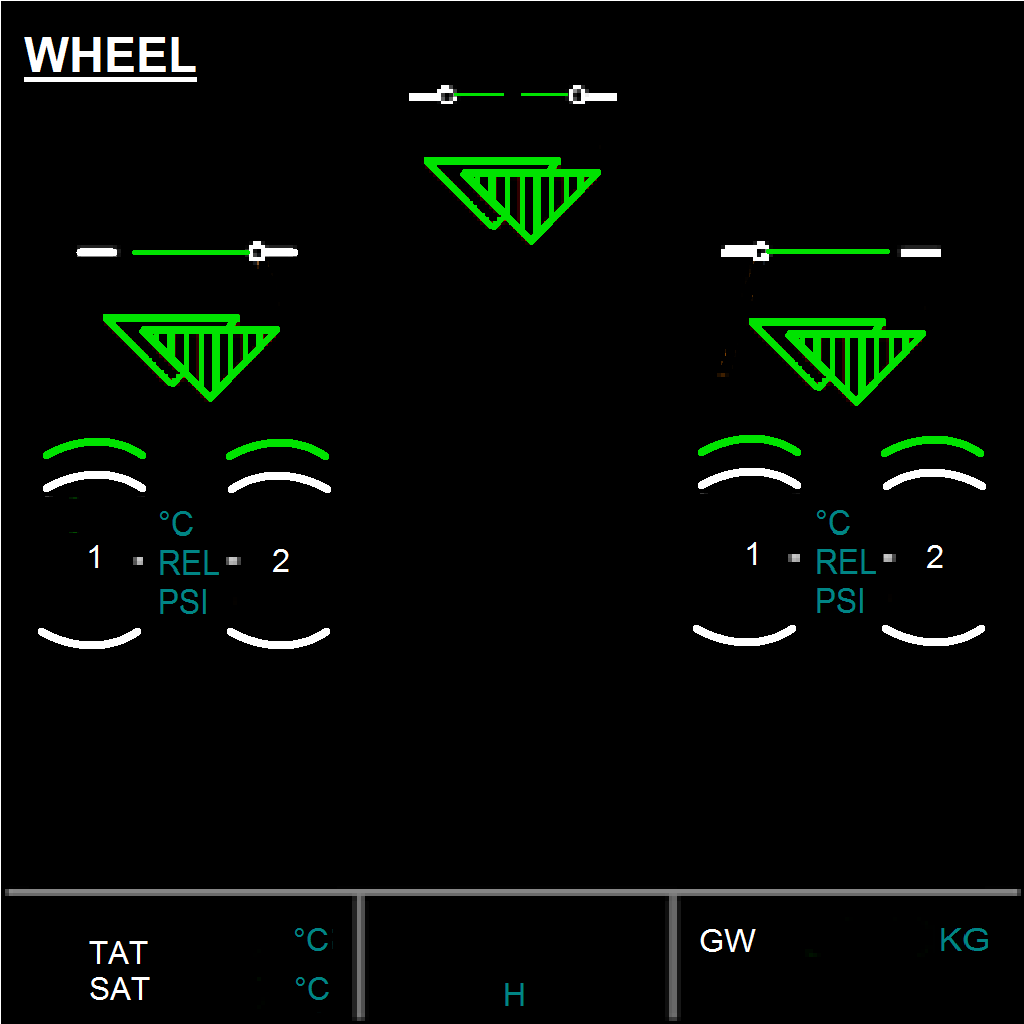
(image error) Size: 23 KiB
|
BIN
Models/Instruments/ECAM/res/page-wheelold.png
Normal file
BIN
Models/Instruments/ECAM/res/page-wheelold.png
Normal file
{kind=link}
Binary file not shown.
|
After 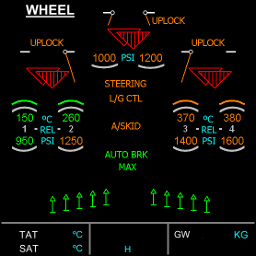
(image error) Size: 24 KiB |
|
|
@ -4,9 +4,9 @@
|
|||
|
||||
var lgciu_one_init = func {
|
||||
print("LGCIU No 1: Initializing");
|
||||
setprop("controls/lgciu[0]/mlgleft",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[0]/mlgright",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[0]/nlg",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[0]/mlgleftpos",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[0]/mlgrightpos",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[0]/nlgpos",1); #0 = retracted, 1 = extended
|
||||
setprop("/controls/lgciu[0]/doors/mlgleft",0); #0 = closed, 1 = open
|
||||
setprop("controls/lgciu[0]/doors/mlgright",0); #0 = closed, 1 = open
|
||||
setprop("controls/lgciu[0]/doors/nlg",0); #0 = closed, 1 = open
|
||||
|
|
@ -30,13 +30,13 @@ var lgciu_one_init = func {
|
|||
}
|
||||
|
||||
var lgciu_two_init = func {
|
||||
print("LGCIU No 2: Initializing");
|
||||
setprop("/controls/lgciu[1]/mlgleft",1); #0 = retracted, 1 = extended
|
||||
setprop("/controls/lgciu[1]/mlgright",1); #0 = retracted, 1 = extended
|
||||
setprop("/controls/lgciu[1]/nlg",1); #0 = retracted, 1 = extended
|
||||
print("LGCIU No 1: Initializing");
|
||||
setprop("controls/lgciu[1]/mlgleftpos",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[1]/mlgrightpos",1); #0 = retracted, 1 = extended
|
||||
setprop("controls/lgciu[1]/nlgpos",1); #0 = retracted, 1 = extended
|
||||
setprop("/controls/lgciu[1]/doors/mlgleft",0); #0 = closed, 1 = open
|
||||
setprop("/controls/lgciu[1]/doors/mlgright",0); #0 = closed, 1 = open
|
||||
setprop("/controls/lgciu[1]/doors/nlg",0); #0 = closed, 1 = open
|
||||
setprop("controls/lgciu[1]/doors/mlgright",0); #0 = closed, 1 = open
|
||||
setprop("controls/lgciu[1]/doors/nlg",0); #0 = closed, 1 = open
|
||||
setprop("/controls/lgciu[1]/gearlever",1); #0 = retracted, 1 = extended
|
||||
print("L/G SYS: Gears and Doors Set");
|
||||
setprop("/controls/lgciu[1]/mlgleft/isdownlock",1); #0 = no, 1 = yes
|
||||
|
|
@ -57,7 +57,6 @@ var lgciu_two_init = func {
|
|||
}
|
||||
|
||||
|
||||
|
||||
# Initialize Landing Gear Control and Indication Unit
|
||||
setlistener("/sim/signals/fdm-initialized", func {
|
||||
print("Landing Gear System: Initializing");
|
||||
|
|
@ -77,6 +76,38 @@ setlistener("/gear/gear[0]/wow", func {
|
|||
}
|
||||
});
|
||||
|
||||
### Interpolate MLG and NLG so that they take 8 seconds to move positions ###
|
||||
setlistener("/controls/gear/gear-down", func {
|
||||
var gr = getprop("/controls/gear/gear-down");
|
||||
var mlgl = getprop("/controls/lgciu[0]/mlgleftpos");
|
||||
var mlgr = getprop("/controls/lgciu[0]/mlgrightpos");
|
||||
var mlgl2 = getprop("/controls/lgciu[1]/mlgleftpos");
|
||||
var mlgr2 = getprop("/controls/lgciu[1]/mlgrightpos");
|
||||
var inuseno1 = getprop("/controls/lgciu[0]/inuse");
|
||||
var inuseno2 = getprop("/controls/lgciu[1]/inuse");
|
||||
if ((gr == 1) and (inuseno1 == 1)) {
|
||||
interpolate("/controls/lgciu[0]/mlgleftpos", 1, 10);
|
||||
interpolate("/controls/lgciu[0]/mlgrightpos", 1, 10);
|
||||
setprop("/controls/lgciu[1]/mlgleftpos",1);
|
||||
setprop("/controls/lgciu[1]/mlgrightpos",1);
|
||||
} else if ((gr == 1) and (inuseno2 == 1)) {
|
||||
interpolate("/controls/lgciu[1]/mlgleftpos", 1, 10);
|
||||
interpolate("/controls/lgciu[1]/mlgrightpos", 1, 10);
|
||||
setprop("/controls/lgciu[0]/mlgleftpos",1);
|
||||
setprop("/controls/lgciu[0]/mlgrightpos",1);
|
||||
} else if ((gr == 0) and (inuseno1 == 1)) {
|
||||
interpolate("/controls/lgciu[0]/mlgleftpos", 0, 10);
|
||||
interpolate("/controls/lgciu[0]/mlgrightpos", 0, 10);
|
||||
setprop("/controls/lgciu[1]/mlgleftpos",0);
|
||||
setprop("/controls/lgciu[1]/mlgrightpos",0);
|
||||
} else if ((gr == 0) and (inuseno2 == 1)) {
|
||||
interpolate("/controls/lgciu[1]/mlgleftpos", 0, 10);
|
||||
interpolate("/controls/lgciu[1]/mlgrightpos", 0, 10);
|
||||
setprop("/controls/lgciu[0]/mlgleftpos",0);
|
||||
setprop("/controls/lgciu[0]/mlgrightpos",0);
|
||||
}
|
||||
});
|
||||
|
||||
### Checking the Green Hydraulic System ###
|
||||
#var checkgreen = func {
|
||||
setlistener("/controls/gear/gear-down", func {
|
||||
|
|
|
|||
Reference in a new issue